Testing real automated parking carousels was costly and risky.
The old “simulator” skipped sensors and fault states → gave false confidence.
Needed something that captured hundreds of interconnected states.
MY APPROACH (ITERATION 1)
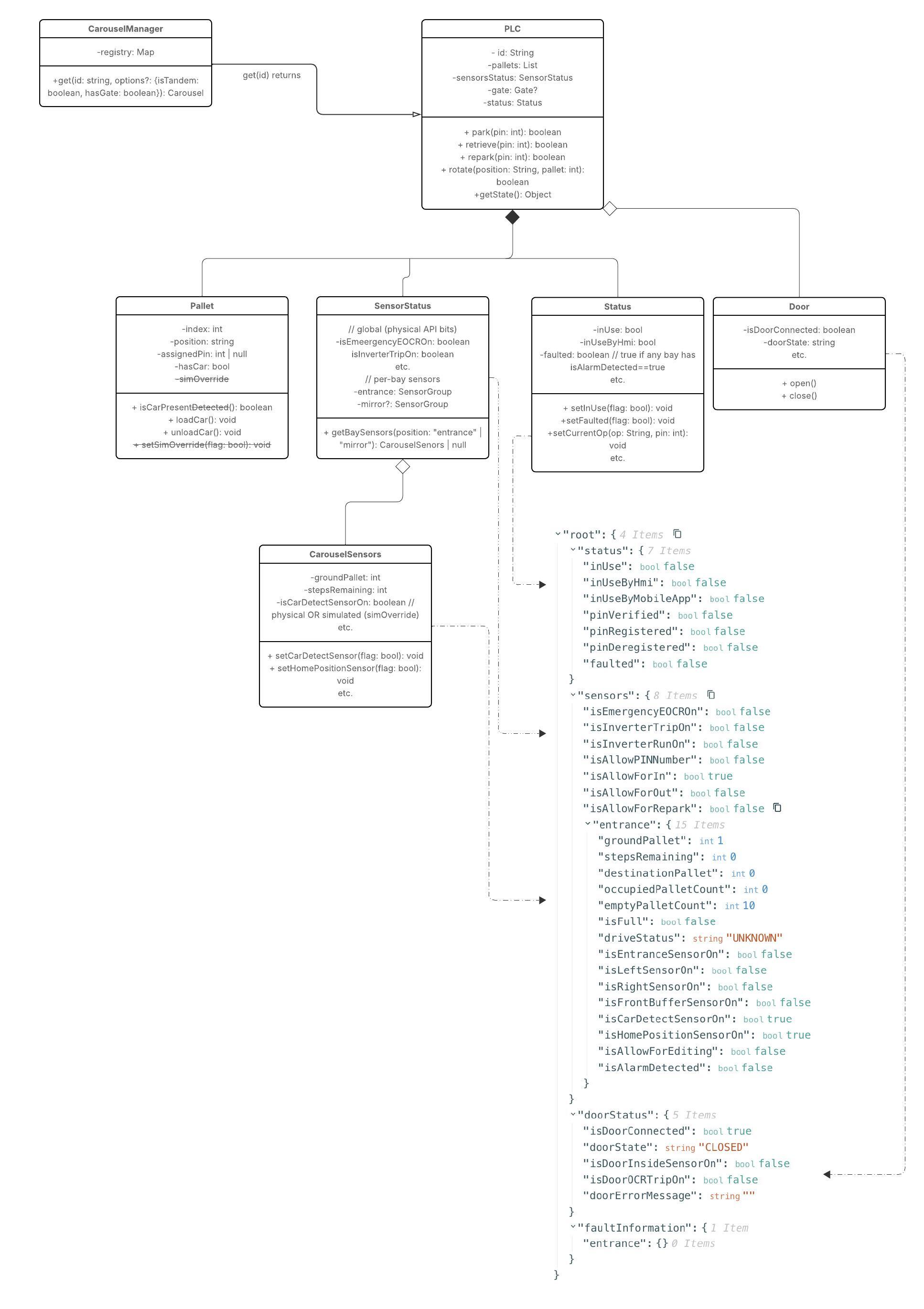
I started by treating the carousel as a living state machine, mapping every signal: inverter trips, drive status, pallet occupancy, door sensors. JSON dumps became my blueprint.
First Iteration. Exhaustive model that mirrored JSON structure one-to-one.
Modeled every component: PLC, sensors, pallets, doors, status objects.
Powerful, but too heavy — changes meant plumbing through layers.
Simulator reflected API fields more than real machine behavior.
THE REFACTOR (ITERATION 2)
After a few days, I stepped back and asked: what are the verbs and invariants?
Rotate to bay N.
Open door only if safe.
Reserve a pallet.
Fail closed on alarm.
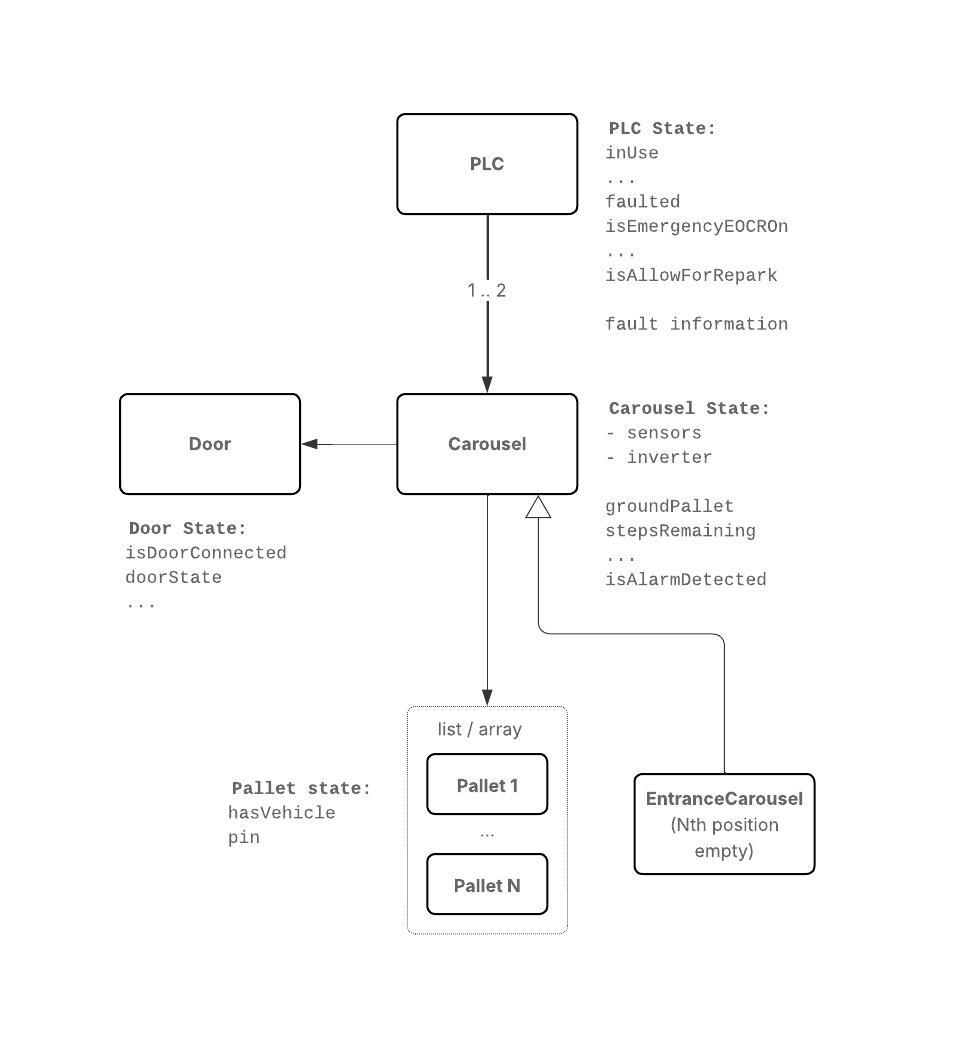
Second Iteration. Simplified: PLC orchestrates, Carousel owns motion & sensors, Door enforces interlocks.
Collapsed classes, tightened responsibilities.
Commands drove explicit state transitions → clearer, safer.
Edge cases became scenarios: inverter trip mid-rotation, door sensor mismatch, simultaneous entries.
Deterministic logs allowed easy replay and debugging.
THE REALITY WE SIMULATED
The Target Reality. Full-scale parking carousel — the system my simulation had to mirror safely in software.
IMPACT
Simulation “felt real” — trusted enough to run in CI pipelines.
Cycle times dropped dramatically.
New features prototyped without touching hardware.
Foundation for scaling to tandem carousels, gates, and future variations.